|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
אינציקלופדיה של רדיו אלקטרוניקה והנדסת חשמל מכשיר לניטור מרחוק של תקינות חיישנים פיזואלקטריים
אנציקלופדיה של רדיו אלקטרוניקה והנדסת חשמל / התקני אבטחה ואיתת עצמים סכנת ההשלכות של תאונה מחייבת הטלת דרישות מוגברות לאמינות ערוץ המדידה ובעיקר החיישן, שכן הוא מופעל בתנאים הקשים ביותר הקיימים במתקן זה. יש צורך לשלוט בתכונותיו כאמצעי מדידה לעתים קרובות יותר מאשר נעשה באימות תקופתי (בדרך כלל פעם בשנה). מכיוון שהחיישן מותקן לעתים קרובות במקום שקשה להגיע אליו (לדוגמה, מתחת למארז של היחידה), השליטה חייבת להתבצע מרחוק. שיטת הבקרה [1], המיושמת במכשיר המתואר ומאפשרת אותה, מבוססת על העובדה שהמתמר הפיאזואלקטרי של החיישן הפיך, הוא יוצר אות חשמלי כאשר הוא מופעל בצורה מכנית וחווה עיוות מכני כאשר מופעל מתח. בשני המקרים, רמת התגובה לפגיעה נקבעת על ידי אותו מקדם, הנקרא פיזו-מודוס. האינרציה של החיישן כמערכת מכנית נקבעת על פי תדירות התנודות החופשיות שלו, התלויה בעיקר בתכונות החיישן עצמו, אך גם בתכונות המכניות של החלק של האובייקט שנמצא במגע עם החיישן. זה נקרא תדירות תהודה ההתקנה (UR). האינרציה החשמלית אינה קשורה לזו המכנית והיא נקבעת בקירוב הראשון לפי תוצר הקיבול של החיישן עם הכבל וההתנגדות הפעילה של העומס שלו. ספקטרום התדרים של הרטט הנמדד על ידי החיישן נמצא תמיד מתחת לתדר ה-SD (אחרת תוצאת המדידה תהיה לא אמינה), תופס, ככלל, את השטח מאפס עד 0,2...0,3 מערכו. כדי להתחבר למכשיר הבקרה המתואר, החיישן מנותק מהציוד איתו הוא עובד. מתח קבוע מופעל עליו, מטעין את הקיבול שלו ומעוות את האלמנט הפיאזואלקטרי. משך הפעולה הזה צריך להיות כזה שלכל התהליכים המכניים והחשמליים החולפים יהיה זמן להסתיים. לאחר מכן, מקור המתח מנותק מהחיישן והתנגדות פעילה קטנה מחוברת למסופים של האחרון למשך זמן (בדרך כלל כמה עשרות מיקרו-שניות), מספיק לפריקה כמעט מלאה של קיבול החיישן. העיוות המכני של האלמנט הפיאזואלקטרי אינו יכול להשתנות באותו קצב, החזרה שלו למצב ההתחלתי מתרחשת בצורה של תנודות דחוסות עם התדר SD. האלמנט הפיאזואלקטרי ממיר את התנודות הללו לאות חשמלי, הנקלט, למשל, על ידי אוסילוסקופ אחסון. סימן למצב הנורמלי של החיישן הוא הבלתי משתנה של הצורה והרמה של האות במהלך ניטור חוזר. הצמתים העיקריים של מכשיר הבקרה הם שני ויברטורים בודדים, הקובעים את משך מרווחי הסגירה והרישום, ושני מתגים. עירור התנודות על ידי דעיכה של הדופק עם משך סגירה יציב מאפשר להגיע לחזרה טובה של הרמה והצורה של האות החשמלי, הנחוצה לפעולות מטרולוגיות. הגרסה המתוארת של המכשיר היא קצת יותר מסובכת. מכיוון שאוסילוסקופ האחסון הוא מכשיר יקר ונדיר יחסית, תהליך הבקרה נעשה מחזורי, מה שאפשר להשתמש באוסילוסקופ רגיל. לאמינות רבה יותר בקביעת התדר של SD, הוכנס מסנן שמדכא הפרעות בתדר גבוה. יש ספק כוח אוטונומי במתח נמוך ומד תדר UR עם מחוון LED.
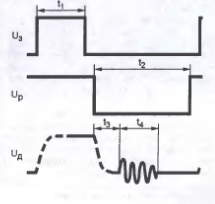
סכמת המכשיר מוצגת באיור. 1. המולטיוויברטור על האלמנטים DD1.1 ו-DD1.2 יוצר פולסים מלבניים. מהפלט של האלמנט DD1.2, פעימה של משך t מוזנת לכניסת הבקרה של המתג DA1.3. במהלך פעולתו, מסופק מתח טעינה של +1 V דרך מתג סגור לכניסת החיישן המחובר למחבר X14 דרך מעגל R15R3HL12 (עקומה U3 באיור 2).
הקיבול של החיישן נטען עד למתח זה. ה-HL3 LED מיועד לאותת קצר חשמלי במעגל החיישן. הפולס, הפוך ביחס לנחשב, מגיע מהפלט של האלמנט DD1.1 דרך המעגלים המבדילים (C2R6) והשילוב (C4R11) לכניסות של האלמנט DD1.3. במוצא שלו, נוצר פולס ברמה לוגית נמוכה, הממוקם בהפסקה בין פעימות הטעינה, אך עם משך t2 קצר מההפסקה. דרך מעגל ההבחנה C6R18, הקצה הנופל של הדופק הזה מתחיל ויברטור בודד בטיימר DA6, שהפולס שלו, עם משך הזמן שנקבע על ידי הפרמטרים של מעגל R21C7 (מרווח t3 באיור. 2), מוזן ל- כניסת בקרה של המתג התחתון (לפי המעגל) של המיקרו-מעגל DA2. במקרה זה, יציאת החיישן (פין 3 של מחבר X1) מחוברת לחוט משותף דרך המתג והנגד R12, ומפרקת את קיבול החיישן. המתח על פני החיישן (עקומת U באיור 2) יורד לאפס. הקצה הנופל של פעימת הטיימר מפעיל ויברטור יחיד על האלמנטים DD6.1 ו-DD6.3, יוצר פולס של משך t4 (נקבע על ידי הפרמטרים של מעגל C13R31R53) המתנודד כעת בטבעו, דרך מעגל ההבחנה C6.2R2 מוזן לכניסת המגבר ב-Op-amp DA5, אשר לפלט שלו, דרך הנגד R16, מתג SA4 מחבר או את הקבל C25 ("מצב אינדיקציה") או את הנגד R3 ("מצב אבחון"). במקרה הראשון נוצר מסנן החלקה, במקרה השני - מחלק מתח בלתי תלוי בתדר. לאחר מכן, האות עובר למחבר X8, שאליו מחובר אוסילוסקופ או מקליט אחר. פולס סנכרון יוצא לאותו מחבר, החופף בזמן לתחילת המרווח t27. הצמתים הנותרים של המכשיר יוצרים מד תדר UR. אות החיישן בעזרת מגבר DA3 ומשווה מתח DA5 מומר לסדרה של פולסים בעלי משרעת סטנדרטית. הרווח (10 או 20) נבחר על ידי המתג SA2, שמצבו מצוין על ידי נוריות HL1 ו-HL2. ספירת הפולסים מהפלט של המשווה במשך 1 ms תיתן את הערך של תדר ה-SD בקילו-הרץ. עם זאת, שיטה זו התבררה כלא מקובלת, שכן התנודות הטבעיות של חיישנים פיזואלקטריים מודרניים מתפוררות הרבה יותר מהר. לכן, היה צורך לספור את הפולסים למספר מרווחים קצרים יותר עם משך כולל של 1 ms. הניסוי הראה ששני מרווחים של 500 מיקרון מספיקים בהחלט. החשבון מתקדם כדלקמן. לאחר לחיצה על כפתור SB2 "Set. 0", מונה DD2.1 מוגדר למצב מוכנות לספירה, המצוין על ידי נורית HL4 "Ready", והמונים DD4 ו-DD5 מוגדרים לאפס. לחיצה ארוכה על כפתור "התחל" SB1 פותחת את המתג DA1.1, ופולסי השעון מהפלט של האלמנט DD1.2 עוברים דרך המתג הפתוח DA1.2 אל המונה DD2.1. שתי כניסות של אותות האלמנט DD3.2 מגיעות מהיציאות 2 ו-4 של המונה, והכניסה השלישית שלו - מהפלט של האלמנט DD6.2. כתוצאה מכך, רמה גבוהה בפלט של אלמנט DD3.3 קיימת רק במהלך מחזורי הפעולה שלאחר פעימות הטעינה השישית והשביעית (בספירה מרגע הלחיצה על כפתור SB1). הפולס השמיני קובע רמה גבוהה במוצא 8 של המונה DD2.1, שסוגר את המתג DA3.1 דרך המהפך DD1.2. קבלת הפולסים בכניסה של המונה DD2.1 נעצרת, ונורית HL4 כבה. כעת ניתן לשחרר את כפתור SB1. הפלט של האלמנט DD3.3 מחובר לכניסת הבקרה של המתג DA1.4, מחובר בין הפלט של המשווה DA5 לכניסה של המונה DD4. חיווי המצב של המונים DD4 ו-DD5 אינו רגיל לגמרי - באמצעות שני קווים בני עשרה ימים של נוריות LED HL5-HL24. זה נעשה כדי להפחית את צריכת הזרם: הצריכה הכוללת של כל הנוריות הללו בכל מקרה אינה עולה על 8 mA. למרבה הצער, צגי LCD חסכוניים אפילו יותר אינם מתאימים בגלל טווח טמפרטורת הפעולה הלא מספיק. דיודות VD1-VD3 הוצגו להפחתת דיבור הצלב. כל הקבלים במכשיר הם קרמיים, ו-C7 ו-C13 חייבים להיות בעלי TKE קטן, הם יכולים להיות שונים, למשל, נציץ. עמידים בחום (לדוגמה, C2-31) צריכים להיות גם נגדים R21 ו-R31. מתגים - הזזה בגודל קטן B1561. עם זאת, במקום SA3, עדיף להשתמש בכפתור עם מיתוג מגעים, למשל PS580N. מיקום המגעים בעת שחרור הכפתור חייב להתאים למיקום המוצג בתרשים באיור. אחד. סוג המחבר X1 תלוי באילו חיישנים אמורים להיבדק לרוב. המחבר השתמש בתקע בלוק RS-4TV, שכן עיקר חיישני הרטט התעשייתיים הביתיים הם מדי תאוצה פיזואלקטריים ABC ו-ANS עם שקעי כבלים RS-4TV, שהקצאת המגעים שלהם מתאימה לזו שמוצגת בתרשים באיור. 1. היות ובמקרה זה לא נדרשת התנגדות לרטט מחיבור נתיק, רצוי להסיר בזהירות את ההברגה החיצונית על גוף התקע, דבר שיקל ויזרז את תהליך החיבור והניתוק של חיישנים. חיישנים מסוגים אחרים יכולים להיות מחוברים למכשיר באמצעות מתאמים מתאימים. מחבר X2 יכול להיות כל, למשל, ONTS-VG-2-3/16-p. חוט האות בכבל המחובר אליו חייב להיות מסוכך, חוט אות השעון אינו מצריך מיגון.
המכשיר מופעל על ידי סוללה של חמישה עד שישה תאים גלווניים בגודל AA, שהמתח בו מומר ל-bipolar מיוצב +/-12 V באמצעות ממיר TMR0522 [2], המחובר לפי המעגל המופיע באיור. 3. כאשר מתח הסוללה GB1 הוא 7,5 וולט, הזרם הנצרך ממנו הוא 130 ו-145 mA, בהתאמה, במצבי "אבחון" ו"אינדיקציה". המכשיר מורכב על שני לוחות, אחד מעל השני ומחובר באמצעות כבלי סרט. בקרות ונוריות מותקנים על הלוח העליון, ושאר האלמנטים מותקנים על הלוח התחתון, למעט המחברים, הממוקמים על לוח פינתי נפרד. הגוף נבחר מוכן. מכיוון שרוב האלמנטים הפעילים הם שערים לוגיים ומגברי הפעלה ללא תיקון חיצוני, הגדרת מכשיר קווי כהלכה אינה דורשת מאמץ רב. לאחר שווידאתם שהמולטיוויברטור על האלמנטים DD1.1, DD1.2 מייצר פולסים מלבניים סימטריים עם קצב חזרות של 30 ± 5 הרץ, עליכם לבדוק את המיקום והצורה של הפולסים במוצא האלמנט DD1.3 .
בהעדר אוסילוסקופ דו-קרן, לשם כך אתה יכול להשתמש באפעף הפשוט ביותר, שהמעגל שלו מוצג באיור. ארבע.
האוסילוגרמה של האות במוצאו צריכה להיות בצורה המוצגת באיור. 5, כאשר t1 ו-t2 הם אותם מרווחים כמו באיור. 2. בחירת נגדים R6 ו-R11, ודא שהמרווח t2 מתחיל לאחר 0,3 ... 1 שניות לאחר סיום פעימת הטעינה. משך הזמן שלו צריך להיות 5 ... 10 ms, הערך המדויק אינו חשוב. הפולס שנוצר על ידי טיימר DA6 חייב להיות בטווח של 20 ... 30 μs. אבל משך הפולס במוצא של אלמנט DD6.2 חייב להיות מוגדר עם נגד חיתוך R53 השווה ל-500 μs עם הדיוק הגדול ביותר האפשרי. זה משפיע ישירות על שגיאת המדידה של תדר ה-SD.
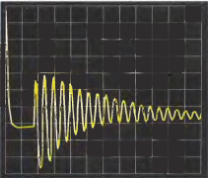
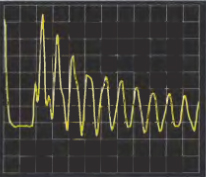
להתאמה נוספת, נדרש חיישן פיזואלקטרי (מד תאוצה), רצוי עם מקדם המרה בסדר גודל של מילי-וולט למטר לשנייה לשנייה ותדר תנודה חופשית (הוא גבוה מתדר SD) של יותר מ-10 קילו-הרץ. על ידי חיבור החיישן למחבר X1, הפקדים של האוסילוסקופ המחוברים למחבר X2 משיגים תמונה יציבה על המסך, בדומה לזו שמוצגת באיור. 6-8. הם מציגים אוסצילוגרמות הממחישות את התלות של האות במצב החיישן: רופף (איור 6); מותקן בהתאם למדריך ההוראות (איור 7); מותקן, אך עם הידוק רופף למבנה המבוקר (איור 8). קנה המידה של האוסילוגרמות לאורך הציר האנכי והאופקי הוא 50 mV/div, בהתאמה. ו-50 µs/div. יכולת החזרה של התנודות הנרגשות מאופיינת בתוצאות של מדידת מיקום הנקודות האופייניות של התנודות עם חזרה של פי עשרה על העירור. ההתפשטות לא עלתה על 1,5% ותקפה למעשה את השגיאה של אוסילוסקופ האחסון S9-8 בשימוש. רצוי לוודא שאין עיוות אות ביציאה של המגבר OP DA3. בפועל, הם לא סבירים, טווח התנודות המעוכות של חיישנים מסוגים שונים משתנה מעט ואינו עולה על כמה מאות מילי-וולט. כאשר בודקים את פעולת ההדק של Schmitt בהשוואה DA5, עליך להשוות את מספר תקופות האותות בפולסי הקלט והמוצא שלו. ספי ההדק נקבעים על ידי מבחר נגדים R19 ו-R23. השליטה הראשונה של החיישן, שתוכננה במיוחד לעבודה על אובייקט תפעולי ארוך טווח וללא הפסקה, רצויה לבצע מיד לאחר התקנתו. במקרה זה, יתברר מיד אם כל הדרישות מתקיימות (אי-שטוח וחספוס מותרים של משטח הישיבה, מומנט הידוק של החוט, היעדר זיהום וכו'). ההפרה שלהם יכולה להפחית את תדירות ה-SD עד כדי כך שאות החיישן לא ישקף נכון את אופי הרטט. כתוצאה מכך, ניתן להפיק פקודת שווא לעצירת חירום של האובייקט. התוצאה המתקבלת (ספירת תדירות ה-SD ומיקום המתג SA2) נרשמת, היא תשמש בסיס להערכת מצב החיישן במהלך מחזורי הבקרה הבאים. הסטייה הנצפית תשמש בסיס למחקר מפורט יותר של מצב החיישן והחלטה על הצורך בתיקון או החלפתו. זה מרמז שהבקרה מתבצעת על יחידה שנעצרה. הטמפרטורה שלו אינה בהכרח קבועה, והאפקט בו נעשה שימוש רגיש לשינוי שלו. כפי שצוין לעיל, בשני שלבי תהליך עירור התנודות, התגובות לפגיעות נקבעות לפי ערך המודול הפיזואלקטרי - המאפיינים של חומר המתמר, התלוי במידת הסדר של מבנה המיקרו שלו, ההולך ופוחת. עם עלייה בטמפרטורה. במקרה זה, המשרעת של האות החשמלי פרופורציונלית לריבוע של המודול הפיזואלקטרי ותלות הטמפרטורה שלו חזקה יותר בהתאם. על פי הניסוי, לאות החיישן עם טמפרטורת הפעלה מקסימלית של 250 מעלות צלזיוס במהלך בקרה בטמפרטורות של עד 120 מעלות צלזיוס הייתה חוסר יציבות בטווח של ±6%. לכן, רצוי שבכל מחזורי הבקרה פיזור הטמפרטורה לא יעלה על 20 מעלות צלזיוס. בהקשר זה, עדיף להפעיל את המכשיר בשילוב עם מכשיר המאפשר למדוד את הטמפרטורה של החיישן. האפשרות לבצע בקרה על יחידת ההפעלה תלויה במספר נסיבות. אנו יכולים לומר מיד שאם רמת הרטט שנרשמת על ידי החיישן במהלך פעולה רגילה של האובייקט קרובה לגבול לחיישן, הגבול העליון של ספקטרום הרטט מתקרב לתדר ה-SD, או, לבסוף, לטמפרטורה של ה-SD. החיישן קרוב למקסימום המותר, שליטה בלתי אפשרית. תצטרך לבצע את זה במהלך כיבוי מתוכנן של היחידה, אבל גם במקרה זה, השימוש במכשיר יחסוך זמן וייפטר מעבודה מכנית. אם הנסיבות המפורטות לעיל אינן ברורות כל כך, יש לבצע בקרה לפני ההפעלה ובמהלך הפעלת המתקן. על ידי השוואת התוצאות, תוכל לקבל החלטה מושכלת. יש לזכור ששליטה באמצעות האינדיקטורים המובנים של המכשיר המתואר בלבד מיישמת רק חלק מהאפשרויות. ניתוח של הספקטרום או מאפיינים אחרים של התנודות הטבעיות של החיישן יאפשר לא רק להעריך בצורה מדויקת יותר את מצבו, אלא גם לקבל מידע נוסף על בריאות הצומת של האובייקט עליו מותקן החיישן. העובדה היא שהגבול העליון של הספקטרום של אות החיישן המתקבל במהלך פעולתו הרגילה, לרוב אינו עולה על 1000 הרץ, ולפעמים אפילו נמוך יותר. תקלות קטנות באובייקט משפיעות מעט על אופי ספקטרום הרטט. ומכיוון שהספקטרום רחב יותר לאין ערוך במהלך השליטה, אזי, על ידי ניתוחו, ניתן להבחין אפילו בשינויים קטנים במצב על האובייקט, כמובן, אם הם מתרחשים ליד החיישן. מנתח הספקטרום מחובר למחבר X2 במקום לאוסילוסקופ (או יחד איתו) ומתג SA3 מכוון למצב "אבחון". המכשיר מאפשר לא רק לזהות את העובדה של שינוי במקדם ההמרה של החיישן שנגרם על ידי שינוי במודול הפייזואלקטרי, אלא גם לחשב את הערך החדש שלו. הטכניקה הפשוטה ביותר היא להשוות את האותות במהלך בקרה כפולה: ראשית, מיד לאחר התקנת החיישן, כאשר נתוני האימות האחרון שלו תקפים, ולאחר מכן לאחר הזמן שבו ניתן לצפות לשינויים בפרמטרים של החיישן. בשתי הרשומות, עליך לבחור N תקופות תנודה באותו אופן, בכל אחת מהן לקבוע את טווח האות (ההפרש בין ערכי המקסימום למינימום) ולסכם את הערכים שהתקבלו. אם במהלך הבקרה הראשונית התקבל הסכום V1, ובמהלך הבקרה החוזרת - V2, מקדם ההמרה בזמן הבקרה החוזרת שווה ל
כאשר S1 הוא הערך של מקדם ההמרה שהושג במהלך האימות [3]. ניתן להשתמש בו בניתוח תוצאות המדידה עד לאימות הסטנדרטית הבאה. יישום נוסף של המכשיר ניתן למצוא בייצור חיישנים פיזואלקטריים בשלבי ההרכבה וויסות הפרמטרים. במסך האוסילוסקופ, ניתן לראות את תגובת החיישן לפעולות מתמשכות באותה ברורה כמו בעת הגדרת מסננים באמצעות מטאטא. במקרה זה, ניתן לקבל מידע לא רק על תדירות התהודה, אלא במידה מסוימת גם על ערך מקדם ההמרה. נוסיף כי בנוסף לחיישני רעידות, ניתן במקרים מסוימים לשלוט בחיישני פעימת לחץ פיזואלקטרי, אולם השליטה תהיה איכותית בלבד: על פי עקרון ה"טוב-כשל". ספרות 1. Subbotin M. שיטת עירור חשמלי של תנודות תהודה של מד תאוצה פיזואלקטרי ומכשיר ליישומו. פטנט RF מס' 2150708. - עלון ההמצאות, 2000, מס' 16.
מחבר: מ. סובבוטין, מוסקבה; פרסום: radioradar.net
עור מלאכותי לחיקוי מגע
15.04.2024 פסולת חתולים של Petgugu Global
15.04.2024 האטרקטיביות של גברים אכפתיים
14.04.2024
▪ לוויין העץ הראשון יישלח לחלל ▪ מאיץ הדרון גדול סגור לרגל שיפוץ ▪ מעבדי Intel Celeron 3215U ו-3765U ▪ DisplayPort 1.3 תקן עם רוחב פס של 32,4Gbps
▪ חלק של האתר סינתיסייזרים תדרים. מבחר מאמרים ▪ כתבה השעון עצר בחצות. ביטוי פופולרי ▪ מאמר איפה המסורת החוליגנית של שריפת עז חג המולד ענקית? תשובה מפורטת ▪ מאמר צ'ופה. אגדות, טיפוח, שיטות יישום ▪ מאמר תכנות שבבי זיכרון FLASH. אנציקלופדיה של רדיו אלקטרוניקה והנדסת חשמל ▪ מאמר פתגמים ואמירות של חב"ש. מבחר גדול
בית | הספרייה | מאמרים | <font><font>מפת אתר</font></font> | ביקורות על האתר
www.diagram.com.ua |







 השאר את תגובתך למאמר זה:
השאר את תגובתך למאמר זה: